
היום ננסה להרכיב הכל יחד: ניקח את כל הידע שלנו וננסה לבנות ממנו תוכנית אחת שלמה שתכלול שלושה מצבים:
- מצב של נסיגה כאשר משהו מתקרב אל ה Tiny:Bit
- מצב של נסיעה בעזרת שלט.
- מצב של מעקב אחר קו שחור.
בנוסף - נגדיר מצב 0 שבו הרכב מושבת - הרכב לא נוסע, האורות כבויים והוא לא מגיב לשלט.
שימו לב! כל התוכניות שרשומות כאן מטה - צריכות להיות מוגדרות במיקרו:ביט בעת ובעונה אחת! כל הפוסט הזה מכיל את כל החלקים של תוכנית אחת שלמה!
תחילה נגדיר את הכפתורים ששולטים על כל המצבים:

לאחר שהגדרנו את המעבר בין המצבים נגדיר את התוכנית "כאשר מתחיל". למעשה, התוכנית תאפס את המצב ל - 0, ותכבה את כל המנועים, אורות וכו'.

בואו נבין רגע מה כתוב כאן:
- כיבוי מנועים
- הגדרת חיישן האינפרא אדום (של השלט) ליציאה מספר 8.
- כיבוי האורות האחוריים של הרכב
- כיבוי האורות הקדמיים של הרכב
- שינוי מצב ל - 0.
- שינוי מצב האורות ל - 0, כלומר, כבויים (נרחיב על זה אחר כך...).
עכשיו הגיע הזמן להתחיל להגדיר את המצבים השונים. נתחיל עם מצב 0 - מצב שהרכב "כבוי". כאשר לוחצים על הלוגו של המיקרו:ביט, הרכב יעבור למצב 0 שכולל את ההגדרות הבאות:

אם המצב יהיה 0 -
- האורות הקדמיים יהיו כבויים
- המנועים יהיו כבויים
- האורות האחוריים יהיו כבויים.
נעבור להגדיר את מצב 1 - מצב בו הרכב "יבהל ויברח" בהתאם לחיישן האולטראסוני:

במצב 1, חיישן האולטראסוני יבדוק את המרחק: אם המרחק קטן מ 10 ס"מ - המיקרו:ביט יציג פרצוף מבוהל, יברח לאחור והאורות הקדמיים שלו ידלקו בצבע אדום. במצב "רגיל" שהמרחק גדול מ 10 ס"מ - האורות יהיו בהירים, המיקרו:ביט יציג פרצוף שמח והוא ישאר במקום - בלי לברוח...
מצב 2 הוא מצב בו ה Tiny:Bit מגיב לשלט האינפרא אדום:

- אם לוחצים על חץ קדימה - הרכב יסע קדימה
- אם לוחצים על חץ אחורה - הרכב יסע אחורה
- אם לוחצים על חץ ימינה - הרכב יסע ימינה
- אם לוחצים על חץ שמאלה - הרכב יסע שמאלה
- אם לא לוחצים על כלום - הרכב עוצר
- אם לוחצים על לחצן האורות - המיקרו:ביט משנה את המשתנה "אורות" ל 0 או 1.
שימו לב! כאשר המשתנה "אורות" יהיה שווה ל 0 - האורות הקדמיים יהיו כבויים וכך גם האורות האחוריים. כאשר משתנה "אורות" יהיה שווה ל 1 - האורות הקדמיים ידלקו באור לבן והאורות האחוריים ידלקו באור אדום.
יש עוד המון מצבים שניתן להגדיר בשלט וזאת רק ההתחלה. אם אתם רוצים להוסיף מצבים - אל תשכחו להגדיר שכל הכפתורים בשלט יפעלו רק אם "מצב" = ל 2, ממש כמו בדוגמא כאן למעלה.
אם סיימנו את זה - נעבור למצב האחרון - מצב 3 - בו הרכב עוקב אחר קו שחור:
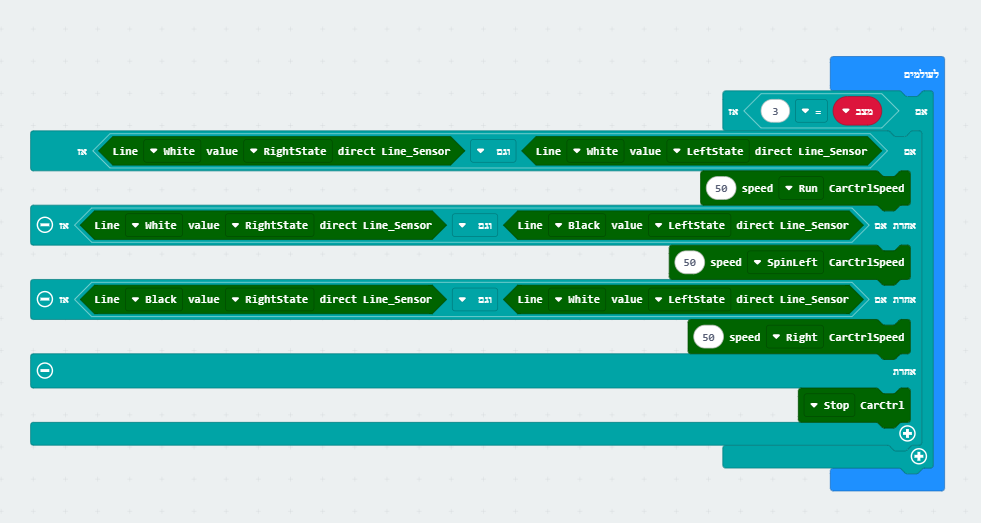
הרכב נוסע כאשר הוא מזהה בשני החיישנים שלו החזר מלא של אינפרא אדום - כלומר, הוא נמצא על גבי משטח בהיר. במצב של נטייה לצד השחור - הרכב יתקן את המיקום שלו על ידי פניה ימינה או שמאלה - על פי מה שקלט מהחיישן. במצב של שחור ושחור - הוא פשוט יעצור במקום ולא יתקדם.
בכל אחד משלושת המצבים האלה - אפשר להוסיף ולשכלל עוד המון:
1. במצב 1 ניתן להגדיר נסיעה עצמאית ועצירה במכשול. ניתן להגדיר שהרכב יעשה קולות מסוימים כאשר הוא בורח או יפעיל גם את האורות האחוריים שלו תוך כדי.
2. במצב 2 ניתן להגדיר כפתורים שונים ומשונים בשלט שמנגנים, מפעילים אורות או יוצרים רצף מיוחד של תנועת מנועים.
3. במצב 3 ניתן להגדיר עצירה כאשר יש מכשול באמצע הקו השחור. ניתן להגדיר אורות מיוחדים או "פרצופים" בהתאם לנסיעה ועוד ועוד..
בהצלחה!!
תודה נדב מטורף
השבמחק